bayesmix/hierarchies
Hierarchies¶
In our algorithms, we store a vector of hierarchies, each of which represent a parameter  .
The hierarchy implements all the methods needed to update : sampling from the prior distribution
.
The hierarchy implements all the methods needed to update : sampling from the prior distribution  , the full-conditional distribution (given the data {
, the full-conditional distribution (given the data { such that
such that  } ) and so on.
} ) and so on.
In BayesMix, each choice of  is implemented in a different
is implemented in a different PriorModel object and each choice of  in a
in a Likelihood object, so that it is straightforward to create a new Hierarchy using one of the already implemented priors or likelihoods.
The sampling from the full conditional of is performed in an Updater class.
State classes are used to store parameters s of every mixture component.
Their main purpose is to handle serialization and de-serialization of the state
API: hierarchies submodules
Main operations performed¶
A hierarchy must be able to perform the following operations:
Sample from the prior distribution: generate
 [
[sample_prior]Sample from the ‘full conditional’ distribution: generate theta_h from the distribution
 [
[sample_full_conditional]Update the hyperparameters involved in
[update_hypers]Evaluate the likelihood in one point, i.e.
 for theta_h the current value of the parameters [
for theta_h the current value of the parameters [like_lpdf]When
 and are conjugate, we must also be able to compute the marginal/prior predictive distribution in one point, i.e.
and are conjugate, we must also be able to compute the marginal/prior predictive distribution in one point, i.e.  , and the conditional predictive distribution
, and the conditional predictive distribution  [
[prior_pred_lpdf,conditional_pred_lpdf]
Moreover, the following utilities are needed:
write the current state
into a appropriately defined Protobuf message [write_state_to_proto]restore theta_h from a given Protobuf message [
set_state_from_proto]write the values of the hyperparameters in
to a Protobuf message [write_hypers_to_proto]
In each hierarchy, we also keep track of which data points are allocated to the hierarchy.
For this purpose add_datum and remove_datum are employed.
Finally, the update involeved in the full-conditional, especially if and are conjugate an semi-conjugate can be performed efficiently from a set of sufficient statistics, hence when add_datum or remove_datum are invoked, the method update_summary_statistics is called.
Code structure¶
We employ a Curiously Recurring Template Pattern (CRTP) coupled with an abstract interface, similarly to the Mixing class.
The code thus composes of: a virtual class defining the API, a template base class that is the base for the CRTP and derived child classes that fully specialize the template arguments.
The class AbstractHierarchy defines the API, i.e. all the methods that need to be called from outside of a Hierarchy class.
A template class BaseHierarchy inherits from AbstractHierarchy and implements some of the necessary virtual methods, which need not be implemented by the child classes.
Instead, child classes must implement:
like_lpdf: evaluatesmarg_lpdf: evaluates m(x) given some parameters (could be both the hyperparameters in or the paramters given by the full conditionals)draw: samples from given the parametersclear_summary_statistics: clears all the summary statisticsupdate_hypers: performs the update of parameters in given all the (passed as a vector of protobuf Messages)initialize_state: initializes the current given the hyperparameters in initialize_hypers: initializes the hyperparameters in given their hyperpriorupdate_summary_statistics: updates the summary statistics when an observation is allocated or de-allocated from the hierarchyget_posterior_parameters: returns the paramters of the full conditional distribution possible only when and are conjugateset_state_from_protowrite_state_to_protowrite_hypers_to_proto
Note that not all of these members are declared virtual in AbstractHierarchy or BaseHierarchy: this is because virtual members are only the ones that must be called from outside the Hierarchy, the other ones are handled via CRTP. Not having them virtual saves a lot of lookups in the vtables.
The BaseHierarchy class takes 4 template parameters:
Derivedmust be the type of the child class (needed for the CRTP)Stateis usually a struct representingHyperparamsis usually a struct representing the parameters inPriormust be a protobuf object encoding the prior parameters.
Abstract Classes¶
-
class AbstractHierarchy¶
Abstract base class for a hierarchy object. This class is the basis for a curiously recurring template pattern (CRTP) for
Hierarchyobjects, and is solely composed of interface functions for derived classes to use. For more information about this pattern, as well the list of methods required for classes in this inheritance tree, please refer to the README.md file included in this folder.This abstract class represents a Bayesian hierarchical model:
A Hierarchy object can compute the following quantities:
the likelihood log-probability density function
the prior predictive probability:
 (for conjugate models only)
(for conjugate models only)the posterior predictive probability
 (for conjugate models only)
(for conjugate models only)
Moreover, the Hierarchy knows how to sample from the full conditional of
 , possibly in an approximate way.
, possibly in an approximate way.In the context of our Gibbs samplers, an hierarchy represents the parameter value associated to a certain cluster, and also knows which observations are allocated to that cluster.
Moreover, hyperparameters and (possibly) hyperpriors associated to them can be shared across multiple Hierarchies objects via a shared pointer. In conjunction with a single
Mixingobject, a collection ofHierarchyobjects completely defines a mixture model, and these two parts can be chosen independently of each other.Communication with other classes, as well as storage of some relevant values, is performed via appropriately defined Protobuf messages (see for instance the
proto/ls_state.protoandproto/hierarchy_prior.protofiles) and their relative class methods.Subclassed by BaseHierarchy< LapNIGHierarchy, LaplaceLikelihood, NxIGPriorModel >, BaseHierarchy< FAHierarchy, FALikelihood, FAPriorModel >, BaseHierarchy< NNWHierarchy, MultiNormLikelihood, NWPriorModel >, BaseHierarchy< NNxIGHierarchy, UniNormLikelihood, NxIGPriorModel >, BaseHierarchy< LinRegUniHierarchy, UniLinRegLikelihood, MNIGPriorModel >, BaseHierarchy< NNIGHierarchy, UniNormLikelihood, NIGPriorModel >, BaseHierarchy< Derived, Likelihood, PriorModel >
Public Functions
Set the update algorithm for the current hierarchy.
-
virtual std::shared_ptr<AbstractLikelihood> get_likelihood() = 0¶
Returns (a pointer to) the likelihood for the current hierarchy.
-
virtual std::shared_ptr<AbstractPriorModel> get_prior() = 0¶
Returns (a pointer to) the prior model for the current hierarchy.
-
virtual ~AbstractHierarchy() = default¶
Default destructor.
-
virtual std::shared_ptr<AbstractHierarchy> clone() const = 0¶
Returns an independent, data-less copy of this object.
-
virtual std::shared_ptr<AbstractHierarchy> deep_clone() const = 0¶
Returns an independent, data-less copy of this object.
-
inline virtual double get_like_lpdf(const Eigen::RowVectorXd &datum, const Eigen::RowVectorXd &covariate = Eigen::RowVectorXd(0)) const¶
Public wrapper for
like_lpdf()methods.
-
inline virtual double prior_pred_lpdf(const Eigen::RowVectorXd &datum, const Eigen::RowVectorXd &covariate = Eigen::RowVectorXd(0)) const¶
Evaluates the log-prior predictive distribution of data in a single point
- Parameters:
datum – Point which is to be evaluated
covariate – (Optional) covariate vector associated to datum
- Returns:
The evaluation of the lpdf
-
inline virtual double conditional_pred_lpdf(const Eigen::RowVectorXd &datum, const Eigen::RowVectorXd &covariate = Eigen::RowVectorXd(0)) const¶
Evaluates the log-conditional predictive distr. of data in a single point
- Parameters:
datum – Point which is to be evaluated
covariate – (Optional) covariate vector associated to datum
- Returns:
The evaluation of the lpdf
-
virtual Eigen::VectorXd like_lpdf_grid(const Eigen::MatrixXd &data, const Eigen::MatrixXd &covariates = Eigen::MatrixXd(0, 0)) const = 0¶
Evaluates the log-likelihood of data in a grid of points
- Parameters:
data – Grid of points (by row) which are to be evaluated
covariates – (Optional) covariate vectors associated to data
- Returns:
The evaluation of the lpdf
-
inline virtual Eigen::VectorXd prior_pred_lpdf_grid(const Eigen::MatrixXd &data, const Eigen::MatrixXd &covariates = Eigen::MatrixXd(0, 0)) const¶
Evaluates the log-prior predictive distr. of data in a grid of points
- Parameters:
data – Grid of points (by row) which are to be evaluated
covariates – (Optional) covariate vectors associated to data
- Returns:
The evaluation of the lpdf
-
inline virtual Eigen::VectorXd conditional_pred_lpdf_grid(const Eigen::MatrixXd &data, const Eigen::MatrixXd &covariates = Eigen::MatrixXd(0, 0)) const¶
Evaluates the log-prior predictive distr. of data in a grid of points
- Parameters:
data – Grid of points (by row) which are to be evaluated
covariates – (Optional) covariate vectors associated to data
- Returns:
The evaluation of the lpdf
-
virtual void sample_prior() = 0¶
Generates new state values from the centering prior distribution.
-
virtual void sample_full_cond(const bool update_params = false) = 0¶
Generates new state values from the centering posterior distribution
- Parameters:
update_params – Save posterior hypers after the computation?
-
virtual void sample_full_cond(const Eigen::MatrixXd &data, const Eigen::MatrixXd &covariates = Eigen::MatrixXd(0, 0)) = 0¶
Overloaded version of sample_full_cond(bool), mainly used for debugging.
-
virtual void update_hypers(const std::vector<bayesmix::AlgorithmState::ClusterState> &states) = 0¶
Updates hyperparameter values given a vector of cluster states.
-
virtual int get_card() const = 0¶
Returns the current cardinality of the cluster.
-
virtual double get_log_card() const = 0¶
Returns the logarithm of the current cardinality of the cluster.
-
virtual std::set<int> get_data_idx() const = 0¶
Returns the indexes of data points belonging to this cluster.
-
virtual google::protobuf::Message *get_mutable_prior() = 0¶
Returns a pointer to the Protobuf message of the prior of this cluster.
-
virtual std::shared_ptr<bayesmix::AlgorithmState::ClusterState> get_state_proto() const = 0¶
Writes current state to a Protobuf message and return a shared_ptr New hierarchies have to first modify the field ‘oneof val’ in the AlgoritmState::ClusterState message by adding the appropriate type
-
virtual void write_state_to_proto(google::protobuf::Message *const out) const = 0¶
Writes current state to a Protobuf message by pointer.
-
virtual void write_hypers_to_proto(google::protobuf::Message *const out) const = 0¶
Writes current hyperparameters to a Protobuf message by pointer.
-
virtual void set_state_from_proto(const google::protobuf::Message &state_) = 0¶
Read and set state values from a given Protobuf message.
-
virtual void set_hypers_from_proto(const google::protobuf::Message &state_) = 0¶
Read and set hyperparameter values from a given Protobuf message.
-
virtual void add_datum(const int id, const Eigen::RowVectorXd &datum, const bool update_params = false, const Eigen::RowVectorXd &covariate = Eigen::RowVectorXd(0)) = 0¶
Adds a datum and its index to the hierarchy.
-
virtual void remove_datum(const int id, const Eigen::RowVectorXd &datum, const bool update_params = false, const Eigen::RowVectorXd &covariate = Eigen::RowVectorXd(0)) = 0¶
Removes a datum and its index from the hierarchy.
-
inline void update_ss(const Eigen::RowVectorXd &datum, const Eigen::RowVectorXd &covariate, const bool add)¶
Public wrapper for
update_summary_statistics()methods.
-
virtual void initialize() = 0¶
Main function that initializes members to appropriate values.
-
virtual bool is_multivariate() const = 0¶
Returns whether the hierarchy models multivariate data or not.
-
virtual bool is_dependent() const = 0¶
Returns whether the hierarchy depends on covariate values or not.
-
virtual bool is_conjugate() const = 0¶
Returns whether the hierarchy represents a conjugate model or not.
-
virtual void set_dataset(const Eigen::MatrixXd *const dataset) = 0¶
Sets the (pointer to) the dataset in the cluster.
-
template<class Derived, class Likelihood, class PriorModel>
class BaseHierarchy : public AbstractHierarchy¶ Base template class for a hierarchy object.
This class is a templatized version of, and derived from, the
AbstractHierarchyclass, and the second stage of the curiously recurring template pattern forHierarchyobjects (please see the docs of the parent class for further information). It includes class members and some more functions which could not be implemented in the non-templatized abstract class. See, for instance,NNIGHierarchyto better understand the CRTP patterns.- Template Parameters:
Derived – Name of the implemented derived class
Likelihood – Class name of the likelihood model for the hierarchy
PriorModel – Class name of the prior model for the hierarchy
Public Functions
Constructor that allows the specification of Likelihood, PriorModel and Updater for a given Hierarchy
-
~BaseHierarchy() = default¶
Default destructor.
Sets the likelihood for the current hierarchy.
Sets the prior model for the current hierarchy.
Sets the update algorithm for the current hierarchy.
-
inline virtual std::shared_ptr<AbstractLikelihood> get_likelihood() override¶
Returns (a pointer to) the likelihood for the current hierarchy.
-
inline virtual std::shared_ptr<AbstractPriorModel> get_prior() override¶
Returns (a pointer to) the prior model for the current hierarchy.
-
inline virtual std::shared_ptr<AbstractHierarchy> clone() const override¶
Returns an independent, data-less copy of this object.
-
inline virtual std::shared_ptr<AbstractHierarchy> deep_clone() const override¶
Returns an independent, data-less deep copy of this object.
-
inline virtual double get_like_lpdf(const Eigen::RowVectorXd &datum, const Eigen::RowVectorXd &covariate = Eigen::RowVectorXd(0)) const override¶
Public wrapper for
like_lpdf()methods.
-
inline virtual Eigen::VectorXd like_lpdf_grid(const Eigen::MatrixXd &data, const Eigen::MatrixXd &covariates = Eigen::MatrixXd(0, 0)) const override¶
Evaluates the log-likelihood of data in a grid of points
- Parameters:
data – Grid of points (by row) which are to be evaluated
covariates – (Optional) covariate vectors associated to data
- Returns:
The evaluation of the lpdf
-
inline double get_marg_lpdf(ProtoHypersPtr hier_params, const Eigen::RowVectorXd &datum, const Eigen::RowVectorXd &covariate) const¶
Public wrapper for
marg_lpdf()methods.
-
inline virtual double prior_pred_lpdf(const Eigen::RowVectorXd &datum, const Eigen::RowVectorXd &covariate = Eigen::RowVectorXd(0)) const override¶
Evaluates the log-prior predictive distribution of data in a single point
- Parameters:
datum – Point which is to be evaluated
covariate – (Optional) covariate vector associated to datum
- Returns:
The evaluation of the lpdf
-
inline virtual Eigen::VectorXd prior_pred_lpdf_grid(const Eigen::MatrixXd &data, const Eigen::MatrixXd &covariates) const override¶
Evaluates the log-prior predictive distr. of data in a grid of points
- Parameters:
data – Grid of points (by row) which are to be evaluated
covariates – (Optional) covariate vectors associated to data
- Returns:
The evaluation of the lpdf
-
inline virtual double conditional_pred_lpdf(const Eigen::RowVectorXd &datum, const Eigen::RowVectorXd &covariate = Eigen::RowVectorXd(0)) const override¶
Evaluates the log-conditional predictive distr. of data in a single point
- Parameters:
datum – Point which is to be evaluated
covariate – (Optional) covariate vector associated to datum
- Returns:
The evaluation of the lpdf
-
inline virtual Eigen::VectorXd conditional_pred_lpdf_grid(const Eigen::MatrixXd &data, const Eigen::MatrixXd &covariates) const override¶
Evaluates the log-prior predictive distr. of data in a grid of points
- Parameters:
data – Grid of points (by row) which are to be evaluated
covariates – (Optional) covariate vectors associated to data
- Returns:
The evaluation of the lpdf
-
inline virtual void sample_prior() override¶
Generates new state values from the centering prior distribution.
-
inline virtual void sample_full_cond(bool update_params = false) override¶
Generates new state values from the centering posterior distribution
- Parameters:
update_params – Save posterior hypers after the computation?
-
inline virtual void sample_full_cond(const Eigen::MatrixXd &data, const Eigen::MatrixXd &covariates = Eigen::MatrixXd(0, 0)) override¶
Overloaded version of sample_full_cond(bool), mainly used for debugging.
-
inline virtual void update_hypers(const std::vector<bayesmix::AlgorithmState::ClusterState> &states) override¶
Updates hyperparameter values given a vector of cluster states.
-
inline auto get_state() const -> decltype(like->get_state())¶
Returns the class of the current state.
-
inline virtual int get_card() const override¶
Returns the current cardinality of the cluster.
-
inline virtual double get_log_card() const override¶
Returns the logarithm of the current cardinality of the cluster.
-
inline virtual std::set<int> get_data_idx() const override¶
Returns the indexes of data points belonging to this cluster.
-
inline virtual std::shared_ptr<bayesmix::AlgorithmState::ClusterState> get_state_proto() const override¶
Writes current state to a Protobuf message and return a shared_ptr New hierarchies have to first modify the field ‘oneof val’ in the AlgoritmState::ClusterState message by adding the appropriate type
-
inline virtual google::protobuf::Message *get_mutable_prior() override¶
Returns a pointer to the Protobuf message of the prior of this cluster.
-
inline virtual void write_state_to_proto(google::protobuf::Message *out) const override¶
Writes current state to a Protobuf message by pointer.
-
inline virtual void write_hypers_to_proto(google::protobuf::Message *out) const override¶
Writes current values of the hyperparameters to a Protobuf message by pointer
-
inline virtual void set_state_from_proto(const google::protobuf::Message &state_) override¶
Read and set state values from a given Protobuf message.
-
inline virtual void set_hypers_from_proto(const google::protobuf::Message &state_) override¶
Read and set hyperparameter values from a given Protobuf message.
-
inline virtual void add_datum(const int id, const Eigen::RowVectorXd &datum, const bool update_params = false, const Eigen::RowVectorXd &covariate = Eigen::RowVectorXd(0)) override¶
Adds a datum and its index to the hierarchy.
-
inline virtual void remove_datum(const int id, const Eigen::RowVectorXd &datum, const bool update_params = false, const Eigen::RowVectorXd &covariate = Eigen::RowVectorXd(0)) override¶
Removes a datum and its index from the hierarchy.
-
inline virtual void initialize() override¶
Main function that initializes members to appropriate values.
-
inline virtual bool is_multivariate() const override¶
Returns whether the hierarchy models multivariate data or not.
-
inline virtual bool is_dependent() const override¶
Returns whether the hierarchy depends on covariate values or not.
-
inline virtual bool is_conjugate() const override¶
Returns whether the hierarchy represents a conjugate model or not.
-
inline virtual void set_dataset(const Eigen::MatrixXd *const dataset) override¶
Sets the (pointer to the) dataset matrix.
Classes for Conjugate Hierarchies¶
-
class NNIGHierarchy : public BaseHierarchy<NNIGHierarchy, UniNormLikelihood, NIGPriorModel>¶
Conjugate Normal Normal-InverseGamma hierarchy for univariate data.
This class represents a hierarchical model where data are distributed according to a Normal likelihood (see the
UniNormLikelihoodclass for details). The likelihood parameters have a Normal-InverseGamma centering distribution (see theNIGPriorModelclass for details). That is:
The state is composed of mean and variance. The state hyperparameters are
 , all scalar values. Note that this hierarchy is conjugate, thus the marginal distribution is available in closed form
, all scalar values. Note that this hierarchy is conjugate, thus the marginal distribution is available in closed form Public Functions
-
inline virtual bayesmix::HierarchyId get_id() const override¶
Returns the Protobuf ID associated to this class.
-
inline void set_default_updater()¶
Sets the default updater algorithm for this hierarchy.
-
inline virtual void initialize_state() override¶
Initializes state parameters to appropriate values.
-
inline virtual double marg_lpdf(ProtoHypersPtr hier_params, const Eigen::RowVectorXd &datum) const override¶
Evaluates the log-marginal distribution of data in a single point
- Parameters:
hier_params – Pointer to the container of (prior or posterior) hyperparameter values
datum – Point which is to be evaluated
- Returns:
The evaluation of the lpdf
-
inline virtual bayesmix::HierarchyId get_id() const override¶
-
class NNWHierarchy : public BaseHierarchy<NNWHierarchy, MultiNormLikelihood, NWPriorModel>¶
Normal Normal-Wishart hierarchy for multivariate data.
This class represents a hierarchy whose multivariate data are distributed according to a multivariate normal likelihood (see the
MultiNormLikelihoodfor details). The likelihood parameters have a Normal-Wishart centering distribution (see theNWPriorModelclass for details). That is:The state is composed of mean and precision matrix. The Cholesky factor and log-determinant of the latter are also included in the container for efficiency reasons. The state’s hyperparameters are
 , which are respectively vector, scalar, matrix, and scalar. Note that this hierarchy is conjugate, thus the marginal distribution is available in closed form
, which are respectively vector, scalar, matrix, and scalar. Note that this hierarchy is conjugate, thus the marginal distribution is available in closed form
Public Functions
-
inline virtual bayesmix::HierarchyId get_id() const override¶
Returns the Protobuf ID associated to this class.
-
inline void set_default_updater()¶
Sets the default updater algorithm for this hierarchy.
-
inline virtual void initialize_state() override¶
Initializes state parameters to appropriate values.
-
inline virtual double marg_lpdf(ProtoHypersPtr hier_params, const Eigen::RowVectorXd &datum) const override¶
Evaluates the log-marginal distribution of data in a single point
- Parameters:
hier_params – Pointer to the container of (prior or posterior) hyperparameter values
datum – Point which is to be evaluated
- Returns:
The evaluation of the lpdf
-
inline HyperParams get_predictive_t_parameters(ProtoHypersPtr hier_params) const¶
Helper function that computes the predictive parameters for the multivariate t distribution from the current hyperparameter values. It is used to efficiently compute the log-marginal distribution of data.
- Parameters:
hier_params – Pointer to the container of (prior or posterior) hyperparameter values
- Returns:
A
HyperParamobject with the predictive parameters
-
inline virtual bayesmix::HierarchyId get_id() const override¶
-
class LinRegUniHierarchy : public BaseHierarchy<LinRegUniHierarchy, UniLinRegLikelihood, MNIGPriorModel>¶
Linear regression hierarchy for univariate data.
This class implements a dependent hierarchy which represents the classical univariate Bayesian linear regression model, i.e.:
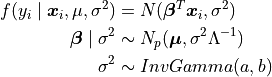
The state consists of the
regression_coeffs , and the
, and the var .
.  is called the variance-scaling factor. Note that this hierarchy is conjugate, thus the marginal distribution is available in closed form. For more information, please refer to the parent class
is called the variance-scaling factor. Note that this hierarchy is conjugate, thus the marginal distribution is available in closed form. For more information, please refer to the parent class BaseHierarchy, to the classUniLinRegLikelihoodfor details on the likelihood model and toMNIGPriorModelfor details on the prior model.Public Functions
-
inline virtual bayesmix::HierarchyId get_id() const override¶
Returns the Protobuf ID associated to this class.
-
inline void set_default_updater()¶
Sets the default updater algorithm for this hierarchy.
-
inline virtual void initialize_state() override¶
Initializes state parameters to appropriate values.
-
inline virtual double marg_lpdf(ProtoHypersPtr hier_params, const Eigen::RowVectorXd &datum, const Eigen::RowVectorXd &covariate) const override¶
Evaluates the log-marginal distribution of data in a single point
- Parameters:
hier_params – Pointer to the container of (prior or posterior) hyperparameter values
datum – Point which is to be evaluated
covariate – Covariate vectors associated to data
- Returns:
The evaluation of the lpdf
-
inline virtual bayesmix::HierarchyId get_id() const override¶
Classes for Non-Conjugate Hierarchies¶
-
class NNxIGHierarchy : public BaseHierarchy<NNxIGHierarchy, UniNormLikelihood, NxIGPriorModel>¶
Semi-conjugate Normal Normal x InverseGamma hierarchy for univariate data.
This class represents a hierarchical model where data are distributed according to a Normal likelihood (see the
UniNormLikelihoodclass for details). The likelihood parameters have a Normal x InverseGamma centering distribution (see theNxIGPriorModelclass for details). That is: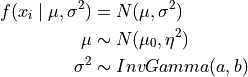
The state is composed of mean and variance. The state hyperparameters are
 , all scalar values. Note that this hierarchy is NOT conjugate, meaning that the marginal distribution is not available in closed form
, all scalar values. Note that this hierarchy is NOT conjugate, meaning that the marginal distribution is not available in closed form Public Functions
-
inline virtual bayesmix::HierarchyId get_id() const override¶
Returns the Protobuf ID associated to this class.
-
inline void set_default_updater()¶
Sets the default updater algorithm for this hierarchy.
-
inline virtual void initialize_state() override¶
Initializes state parameters to appropriate values.
-
inline virtual bayesmix::HierarchyId get_id() const override¶
-
class LapNIGHierarchy : public BaseHierarchy<LapNIGHierarchy, LaplaceLikelihood, NxIGPriorModel>¶
Laplace Normal-InverseGamma hierarchy for univariate data.
This class represents a hierarchical model where data are distributed according to a Laplace likelihood (see the
LaplaceLikelihoodclass for deatils). The likelihood parameters have a Normal x InverseGamma centering distribution (see theNxIGPriorModelclass for details). That is:The state is composed of mean and variance (thus the scale for the Laplace distribution is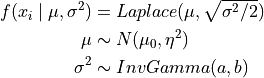
 . The state hyperparameters are
. The state hyperparameters are  , all scalar values. Note that this hierarchy is NOT conjugate, thus the marginal distribution is not available in closed form.
, all scalar values. Note that this hierarchy is NOT conjugate, thus the marginal distribution is not available in closed form.
Public Functions
-
inline virtual bayesmix::HierarchyId get_id() const override¶
Returns the Protobuf ID associated to this class.
-
inline void set_default_updater()¶
Sets the default updater algorithm for this hierarchy.
-
inline virtual void initialize_state() override¶
Initializes state parameters to appropriate values.
-
inline virtual bayesmix::HierarchyId get_id() const override¶
-
class FAHierarchy : public BaseHierarchy<FAHierarchy, FALikelihood, FAPriorModel>¶
Mixture of Factor Analysers hierarchy for multivariate data.
This class represents a hierarchical model where data are distributed according to a multivariate Normal likelihood with a specific factorization of the covariance matrix (see the
FAHierarchyclass for details). The likelihood parameters have a Dirichlet-Laplace distribution x InverseGamma centering distribution (see theFAPriorModelclass for details). That is: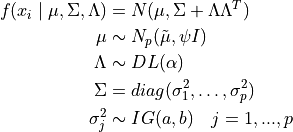
where Lambda is the latent score matrix (size
 with
with  ) and
) and  is the Laplace-Dirichlet distribution. See Bhattacharya et al. (2015) for further details
is the Laplace-Dirichlet distribution. See Bhattacharya et al. (2015) for further details Public Functions
-
inline virtual bayesmix::HierarchyId get_id() const override¶
Returns the Protobuf ID associated to this class.
-
inline void set_default_updater()¶
Sets the default updater algorithm for this hierarchy.
-
inline virtual void initialize_state() override¶
Initializes state parameters to appropriate values.
-
inline virtual bayesmix::HierarchyId get_id() const override¶